
CarDecoder Version 1 Anschlussbelegung
ACHTUNG diese Baugruppe ist veraltet und im Archivmodus!
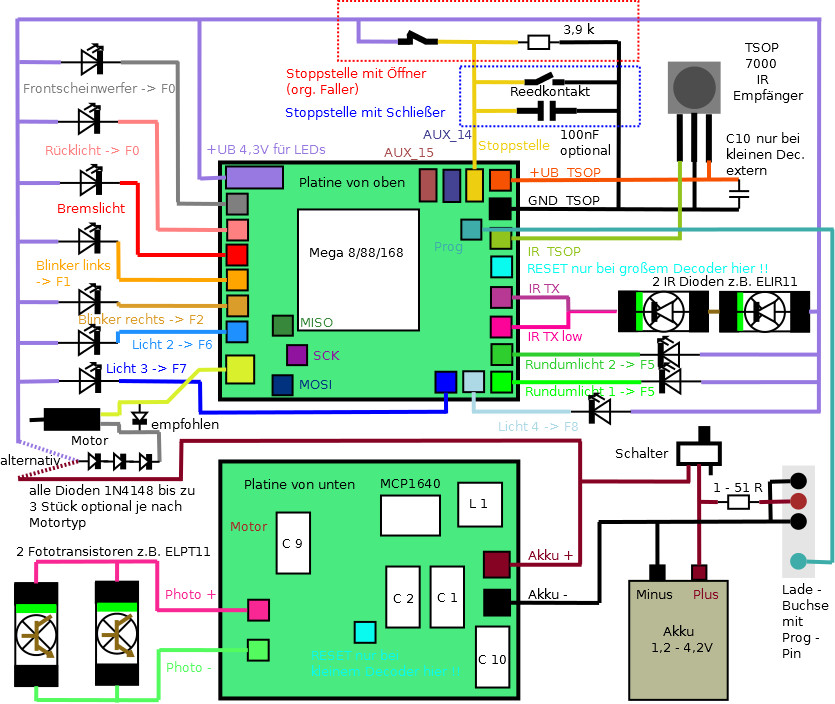
Das Bild zeigt den Decoder von oben und unten. Auf der Unterseite wird nur der Akku und die Fototransistoren von der Fahrzeugfront angeschlossen. Empfohlen und getestet haben wir die ELPT 11 - 21C. Diese haben die SMD Bauform 1206, haben mittig noch eine kleine Linse, was die Empfangsleistung spürbar verbessert gegenüber kleineren Bauformen ohne Linse. Der Kollektor der Transistoren ist mit einer grünen Markierung versehen und muss an den Photo+ Eingang angeschlossen werden!
Die weitaus meisten Anschlüsse befinden sich auf der Oberseite der Platine (oben im Bild). Im Uhrzeigersinn angefangen sind das: AUX_15AUX_15 und AUX_14 , das sind noch zwei freie Ein / Ausgänge, die für zukünftige Funktionserweiterungen zur Verfügung stehen. Es folgt gelb die Stoppstelle. Hier gibt es zwei Varianten der Beschaltung! Entweder wird der Original Reedkontakt (rot eingekreister Bereich, bei Stopp öffnet dieser) nach +UB angeschlossen und ein ca. 3,9kOhm Widerstand nach GND / Akku- angeschlossen, oder es wird (blau eingekreister Bereich) ein schließender Reedkontakt nach GND / Akku- angeschlossen. Optional kann der Reedkontakt (in beiden Versionen möglich) noch mit einem 100nF Kondensator zur Entprellung des Kontakts überbrückt werden. Dann rot +UB TSOP, schwarz GND TSOP und hell grün IR TSOP sind die drei Leitungen zum TSOP 7000 für den "IR Fernempfang". Der TSOP ist so im Fahrzeug zu platzieren, das er irgendwie Sicht nach außen hat (die runde Beule - Linse - ist vorn). z.B. auf dem Beifahrersitz. Bei unlackierten Plastikgehäuse empfängt er eingeschränkt auch durch das Gehäuse (muss man ausprobieren). Der C10 (4,7µF) ist nur beim kleinen Decoder nicht mit auf der Platine und sollte extern direkt am TSOP7000 angebracht werden. Etwas zurück versetzt folgt jetzt der blaue Programmieranschluss, dieser muss nicht unbedingt rausgelegt werden. Sollte man aber machen, wenn man mit der Software aktuell bleiben will und diese einfach updaten möchte. Es handelt sich hier um ein Open Source Projekt, bei dem wir gerne Änderungswünsche mit einfließen lassen können, abgesehen davon bin ich kein Softwareexperte und mir werden Fehler unterlaufen, das ist nun einmal so. Aus diesem Grund habe ich an meinen Fahrzeugen die original Ladebuchse (unten rechts im Bild) um einen Kontakt (im doppeltem Abstand, egal auf welcher Seite) erweitert und dort die Programmierleitung herausgeführt. So ist ein einfaches Softwareupdate ohne öffnen des Fahrzeuges jederzeit von außen möglich. Die nächsten belegten Anschlüsse (der Reset Anschluss kommt später) sind die rosa / violetten IR_TX und IR_TX_low Anschlüsse (diese beiden Pins werden auf der nächsten Platinenversion nur noch ein Anschluss IR_TX sein). Hier werden in Reihe mit der Kathode (das ist wieder die grüne Markierung) die beiden ELIR12 SMD IR - Dioden für die Abstandsregelung und Rückmeldung am Fahrzeugheck angeschlossen. Auch dieser Typ (ELIR11 - 21C) wurde von uns getestet, und sieht den Fototransistoren sehr ähnlich (also nicht vertauschen!). Als nächstes folgen die beiden grünen und hellgrünen Ausgänge für die Rundumlichter 1 und 2 (z.B. Blaulich). Diese schalten beide auf F5 und sind mit einem Blaulicht flackern in den CV 100-118 voreingestellt. Nun folgen in blautönen die drei Licht_4/3/2 Ausgänge. Diese sind auch über CVs mit Effekten frei programmierbar und lassen sich mit den Funktionen F6, F7 und F8 schalten. Unten links folgt nun in grüngelb der Motoranschluss. Dieser schaltet (wie alle Ausgänge) nach GND (minus) und darf mit maximal 500mA belastet werden. Das sollte auch für "große" Car - Motoren ausreichen. Die optionale Diode 1N4148 über dem Motor sollte zum Schutz der Endstufe und zur Störungsunterdrückung angebracht werden. Die drei weiteren Dioden können angebracht werden, um die jetzt größere Versorgungsspannung an den verbauten Motor anzupassen. Ohne sie würde z.B. ein 1,2V Motor aus einem kleinem 3,5T Transporter, welcher jetzt mit 4,3V läuft Formel 1 Geschwindigkeiten erreichen. Man kann sicherlich in der CV5 die maximale Geschwindigkeit begrenzen, aber die fast 4-fache Motorspannung würde ohne Dioden den Regelbereich stark einschränken. Der Motor kann entweder an die +UB (4,3V LED Spannung) oder direkt an den Akku+ (hinter Schalter) angeschlossen werden (Vor- und Nachteile siehe Anleitung). Den blauen Licht_2 Ausgang hatten wir schon, geht es also weiter mit den beiden orangen Blinker_links/rechts Ausgängen welche durch die Funktionen F1 und F2 geschaltet werden weiter. Nun folgt das rote Bremslicht, dieses wird automatisch beim bremsen des Fahrzeuges eingeschaltet und kann auch mit dem rosa Rücklicht verbunden werden, so das beides (Bremslicht und Rücklicht) mit nur einer LED (natürlich auf jeder Seite einer) signalisiert werden kann. In grau folgt jetzt noch der Frontscheinwerfer, welcher wie auch das rosa Rücklicht mit der Funktion FL/F0 gesteuert werden kann. Der letzte und breiteste Anschluss ist der violette +UB Anschluss. Dieser liefert eine konstante Spannung von 4,3V (max. 80mA) für alle LEDs und IR - Dioden. Die Anoden (Pluspol) alle Dioden werden hier angeschlossen. Der Fahrmotor kommt aber unverändert direkt an den Akku + Anschluss (hinter dem Schalter). Die 4,3V Versorgung ist auch für weiße und blaue LEDs geeignet und sollte ausreichend Leistung für die Fahrzeugbeleuchtung liefern. Zu beachten ist aber, das die einzelnen Ausgänge nicht überlastet werden. Es können maximal 20mA an einem Ausgang entnommen werden. Die Vorwiderstände sind für je zwei aktuelle LEDs (Stand2012) bei vernünftiger Helligkeit ausgelegt und müssten bei abweichender Beschaltung angepasst werden. Die kleinsten (220R) Vorwiderstände stellen auch bei einem Kurzschluss am Ausgang sicher, das der maximale Ausgangsstrom nicht überschritten wird (die sollte man also nicht weiter verkleinern). Wie schon beim Brems- und Rücklicht erwähnt, ist es möglich die Ausgänge beliebig zu verbinden und so z.B. eine LED mit verschiedenen Funktionen und Effekten zu schalten.
Die Lade / Programmierbuchse habe ich schon erwähnt, bleibt noch der Akku und der Ladevorwiderstand. Dieser ist in den original Fahrzeugen verbaut, um die verschiedenen Akkugrößen an das Faller Ladegerät anzupassen. Ich denke dieses ist nur für "Gelegenheitsfahrer" tauglich, weil es zwischen 7 und 14 Stunden dauert damit ein Fahrzeug aufzuladen. Verwendet man stattdessen Schnellladegeräte kann dieser Vorwiderstand durchaus hinderlich sein und sich auch schon mal in "Rauch" auflösen! Bei seiner Dimensionierung sollte man sich also zuerst einmal mit seinen Akkutypen und Ladegeräten auseinander setzen und ihn dann anpassen. Ihn völlig wegzulassen, davor kann ich nur ausdrücklich warnen, weil dann könnte eine externe Verbindung an den Ladekontakten einen gewaltigen Kurzschluss und damit verbunden die Zerstörung des Akkus bzw. des Fahrzeuges auslösen. Beim Akku gilt: desto größer desto länger fährt mein Fahrzeug. Die Decoder Hardware kommt sehr gut mit 2-3 NiMh Zellen oder einer Lipo Zelle zurecht. Mit Abstrichen beim maximalen LED Strom ist auch der Betrieb an nur einer NiMh Zelle (1,2V) möglich. In meinen Fahrzeugen haben sich für LKWs und Busse IPOD nano Ersatzakkus mit 330mAh oder 400mAh gut bewährt, diese passen von den Abmessungen sehr schön in die Fahrzeuge, haben von Hause aus schon eine Überwachungselektronik an Bord und sind günstig erhältlich.
Als Richtwerte hier einmal original Ladewiderstände für das Faller Ladegerät (2,9V / 55 mA):
| Akku | Widerstand |
| 1,2V / 140 mAh | 51 Ohm |
| 2,4V /140 mAh | 12 Ohm |
Wer einen Lipo mit speziellen Lipo Ladegerät verwendet, sollte einen
Ladewiderstand von unter 2 Ohm einbauen.